Tvorba algoritmov pre autonómne systémy – 1. část
Autonómne systémy sú zariadenia, ktoré dokážu fungovať nezávisle od ľudského zásahu s použitím snímačov a riadiacich algoritmov a vykonávajú svoju činnosť v neustále sa meniacom prostredí. Môže ísť o roboty (mobilné alebo manipulátory), automobily, drony, námorné vozidlá alebo stavebnú techniku. Pre tieto systémy je potrebné vytvárať algoritmy. Výskumníci a inžinieri využívajú prostriedky prostredí MATLAB, Simulinka ich ďalších nadstavieb na vývoj, simuláciu a verifikáciu súčastí autonómnych systémov od vnímania až po pohyb. V nasledujúcich sekciách si predstavíme tieto možnosti.
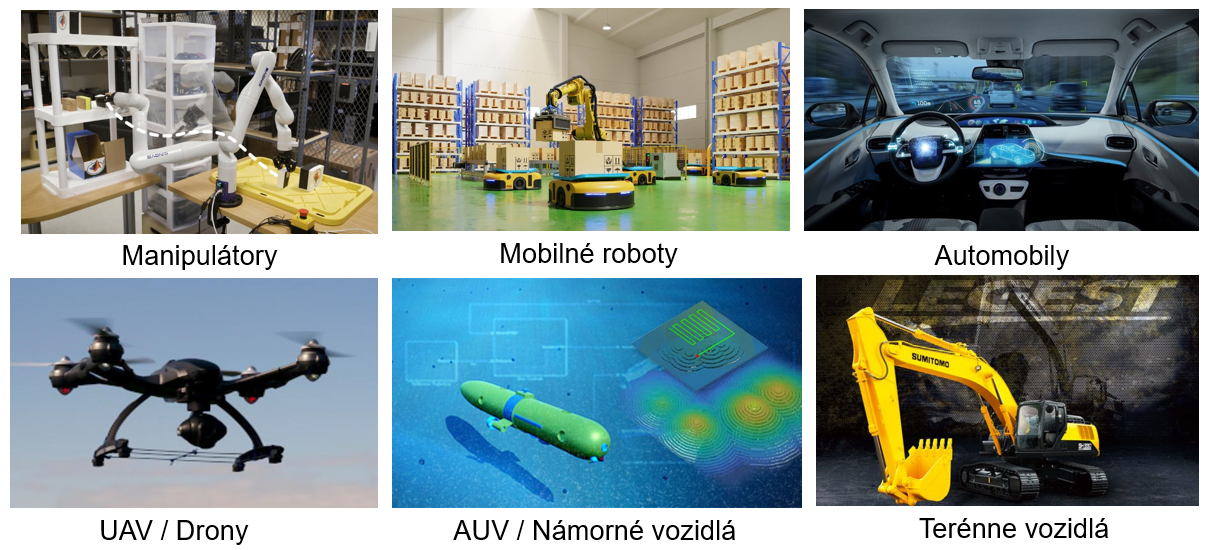
Obr.1 Autonómne systémy.
Model zariadenia a prostredia
Pri vývoji a overovaní algoritmov pre autonómne zariadenia je kľúčové mať dynamický model samotného zariadenia. Takýto model umožňuje simulovať správanie zariadenia v rôznych podmienkach a testovať reakcie na akčné zásahy autonómneho algoritmu. Existuje viacero prístupov k tvorbe týchto modelov v závislosti od požadovanej presnosti a úrovne komplexnosti systému. Ak je zariadenie navrhnuté v CAD prostredí, 3D model možno jednoducho importovať do MATLABu prostredníctvom prostredia Simscape Multibody V prípade robotických aplikácií sa často využíva štandardizovaný formát URDF (Unified Robot Description Format). Samostatnú mechaniku zariadenia možno ďalej rozšíriť pomocou nadstavieb Simscape o detailný fyzikálny model s využitím komponentov pre elektrické systémy, kvapaliny a plyny, prevodovky alebo batériové systémy. Okrem nadstavieb pre detailné fyzikálne modelovanie MATLAB ponúka aj špecializované nástroje pre modelovanie dynamiky systémov podľa zamerania.
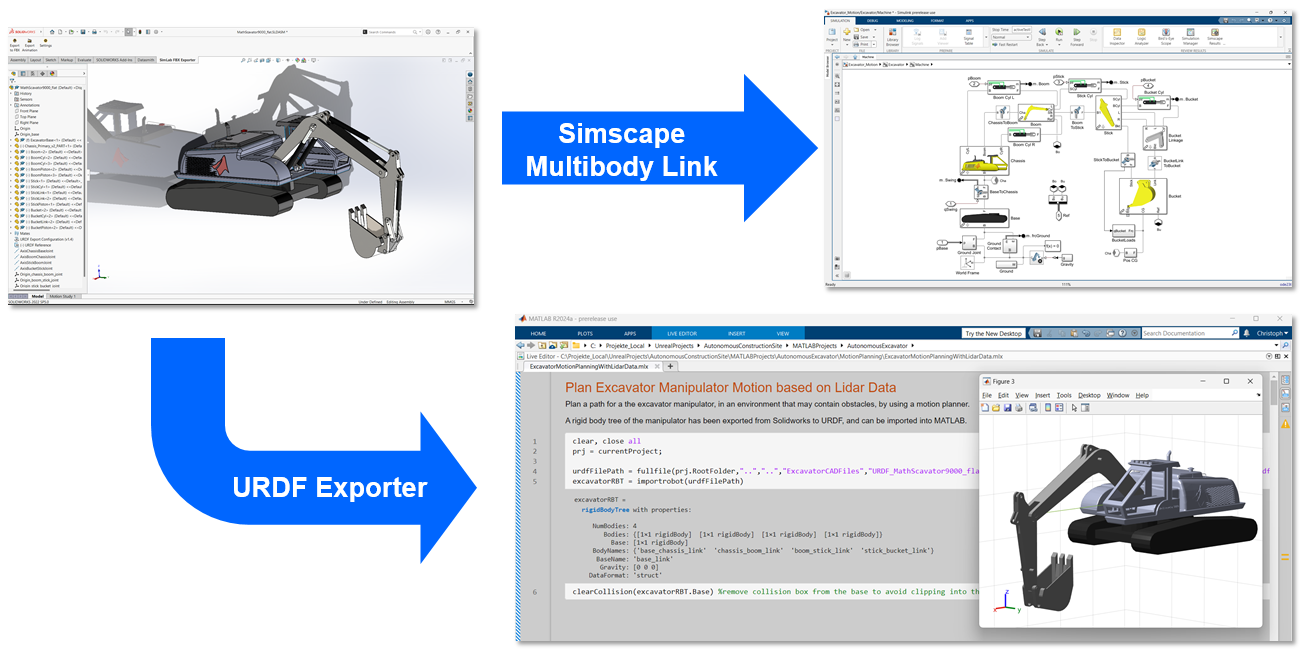
Obr.2 Načítanie modelov z iných prostredí.[smallPicture]
Modelovanie komponentov vozidiel zabezpečujú dve nadstavby. Vehicle Dynamics Blockset obsahuje bloky pre pohyb samostatného vozidla vo viacerých stupňoch voľností, riadenie vozidla, zavesenie kolies, modely kolies a pneumatík, či jednoduché pohony. Detailnejšie modely pohonov obsahuje nadstavba Powertrain Blockset Obsahuje nástroje pre modelovanie spaľovacích, elektrických alebo hybridných pohonov, systémy pre ukladanie energie alebo prevodovky. Nakoľko modely vozidiel sú častokrát zložité, virtuálne vozidlo si viete tiež jednoducho namodelovať pomocou aplikácie Virtual Vehicle Composer. Pre jednoduchý začiatok sú pripravené aj referenčné modely, z ktorých môžete vychádzať.
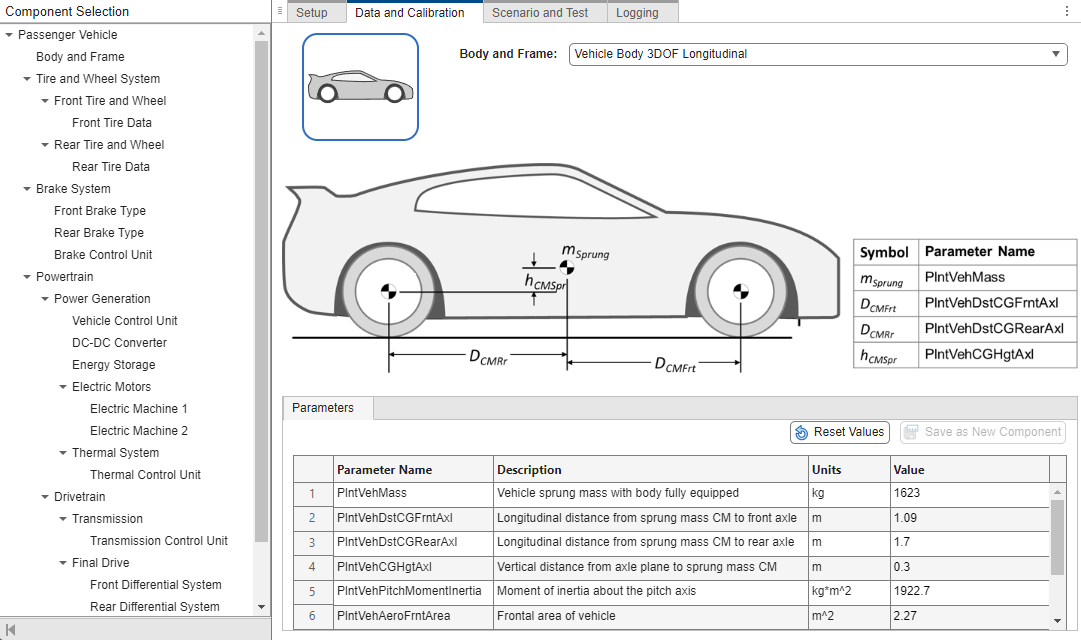
Obr.3 Virtual Vehicle Composer
V oblasti robotiky je možné využiť rozsiahlu knižnicu robotických modelov — obsahuje viac ako 50 modelov od 18 výrobcov a neustále sa rozširuje. Mobilné roboty možno reprezentovať zjednodušenými blokmi ako je Ackermanov kinematický model, diferenciálny podvozok alebo bicyklový kinematický model. Pre manipulátory sú pripravené bloky pre doprednú a inverznú dynamiku, inverznú kinematiku, stavové modely pohybu a ďalšie nástroje. Všetky tieto funkcie sú dostupné v nadstavbe Robotics System Toolbox.
Letecké aplikácie podporuje viacero nadstavieb. Aerospace Blockset poskytuje detailné modelovanie dynamiky letu prostredníctvom blokov pre rôzne stupne voľnosti, s pevnou alebo premenlivou hmotnosťou, určených pre atmosférický let. Umožňuje tiež simuláciu vplyvov prostredia, ako sú gravitácia, magnetické polia či vietor.
UAV Toolbox ponúka zjednodušené modely navádzania s pevnými krídlami a viacrotorové modely, vrátane autopilota a kinematických modelov. K dispozícii sú aj referenčné modely pre quadrotory a VTOL (Vertical Takeoff and Landing) simulácie.
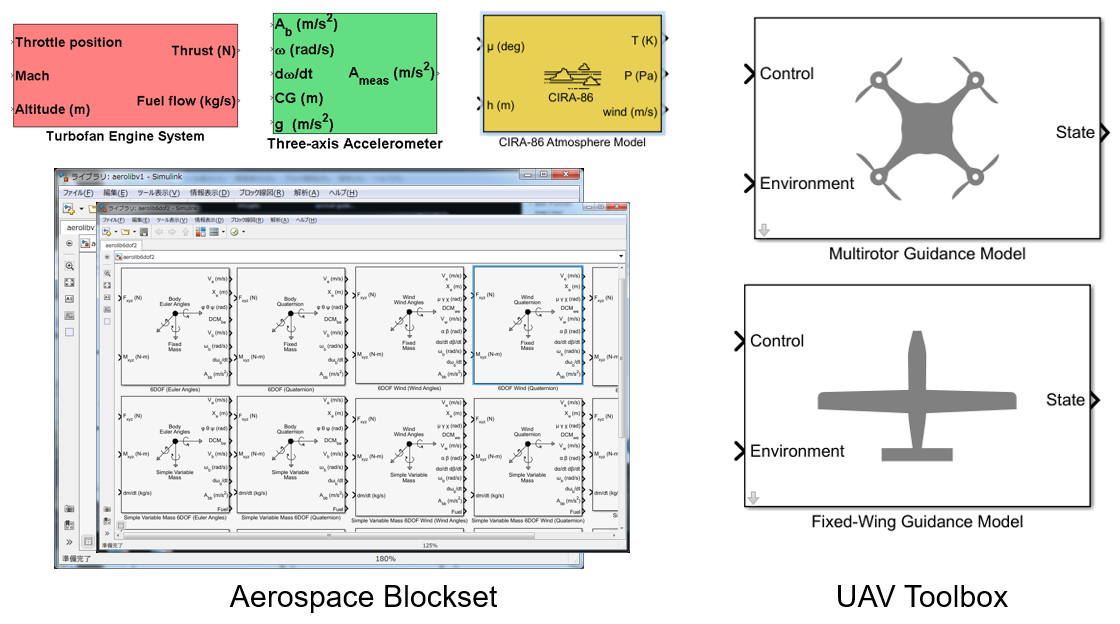
Obr.4 Dynamika letu
Vytvorený model autonómneho zariadenia sa pohybuje v určitom prostredí. Vyššie spomenuté nadstavby podporujú simulácie zariadení dvoma spôsobmi. Pre jednoduché a rýchle simulácie postačuje prostredie reprezentované základnými objektmi, zatiaľ čo pre detailné vizualizácie možno využiť nadstavbu Simulink 3D Animation. Táto nadstavba umožňuje prepojenie s Unreal Engine a obsahuje množstvo predpripravených 3D modelov objektov (osobné a nákladné autá, motocykle, lietadlá, drony) a 3D modelov prostredí (cesty, diaľnice, letiská, parkoviská, mestá, stavby). Tieto modely možno priamo využiť v simuláciách. Z virtuálnych prostredí je možné získavať údaje prostredníctvom virtuálnych snímačov – kamier, lidarov, ultrazvukových snímačov, snímačov čiar či modelov GPS, IMU alebo INS.
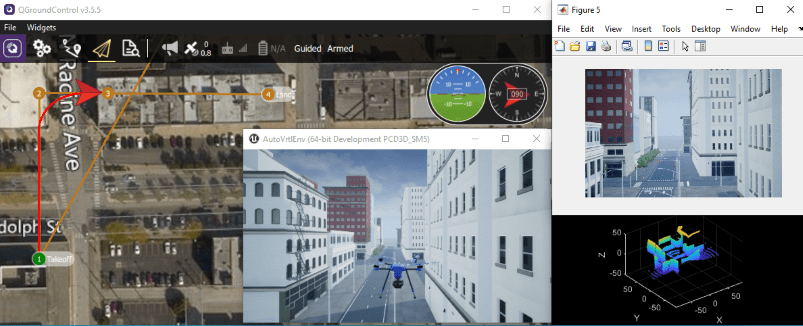
Obr.5 Simulácia v 3D prostredí so snímačmi (kamera, lidar)
Na tvorbu realistických 3D prostredí slúži nástroj RoadRunner, ktorý umožňuje jednoduché a interaktívne modelovanie ciest, jazdných pruhov, križovatiek, dopravného značenia a ďalších objektov. RoadRunner Asset Library poskytuje pokročilé objekty rozširujúce scény o medzinárodné značenia a doplnkové objekty, zatiaľ čo RoadRunner Scene Builder umožňuje generovať scény priamo z HD máp. Okrem samotného zariadenia môžu byť v scéne prítomné aj ďalšie dynamické objekty. Nástroj RoadRunner Scenarioumožňuje pridávať do scény vozidlá, definovať ich pohyb, zmenu rýchlosti alebo jazdného pruhu, prípadne ďalšie správanie. Vytvorené scény a scenáre je možné následne exportovať do štandardizovaných formátov ASAM OpenDRIVE a OpenSCENARIO.
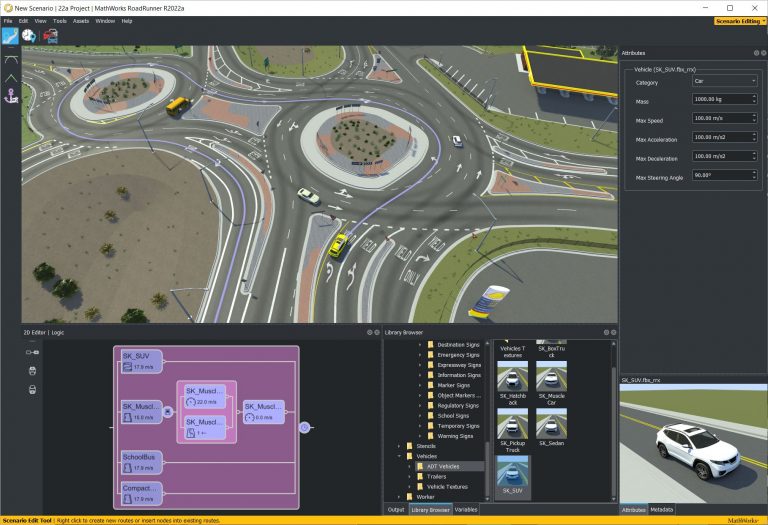
Obr.6 Tvorba scenárov
Michal Blaho, 13.11.2025